A part of the project: Marine Analytics using Computer Vision
BrackishMOT: The Brackish Multi-Object Tracking Dataset
Malte Pedersen, Daniel Lehotský, Ivan Nikolov, Thomas B. Moeslund
SCIA 2023
Abstract
There exist no publicly available annotated underwater multi-object tracking (MOT) datasets captured in turbid environments. To remedy this we propose the BrackishMOT dataset with focus on tracking schools of small fish, which is a notoriously difficult MOT task. BrackishMOT consists of 98 sequences captured in the wild. Alongside the novel dataset, we present baseline results by training a state-of-the-art tracker. Additionally, we propose a framework for creating synthetic sequences in order to expand the dataset. The framework consists of animated fish models and realistic underwater environments. We analyse the effects of including synthetic data during training and show that a combination of real and synthetic underwater training data can enhance tracking performance.
BrackishMOT: a MOT expansion to the Brackish Dataset
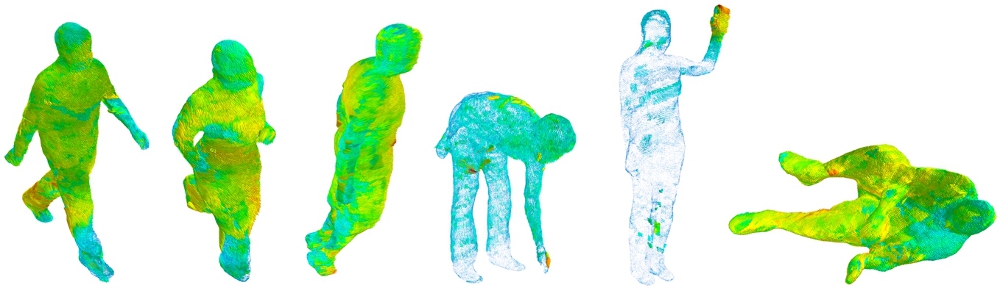
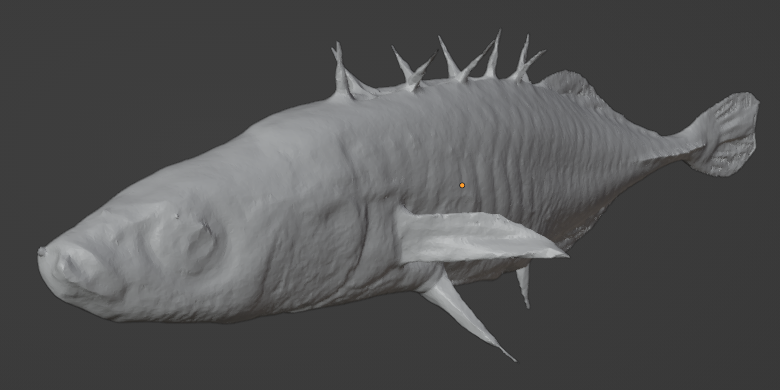
BrackishMOT includes nine new sequences focusing on the small fish class. Additionally, we present a framework for creating underwater synthetic MOT sequences with models of sticklebacks exhibiting social and group behavior.


Citation
@InProceedings{Pedersen_2023,
author = {Pedersen, Malte and Lehotský, Daniel and Nikolov, Ivan and Moeslund, Thomas B.},
doi = {10.48550/ARXIV.2302.10645},
title = {BrackishMOT: The Brackish Multi-Object Tracking Dataset},
publisher={arXiv},
year={2023}
}