Project
Autonomous agricultural vehicles are the future, and their autonomy is progressing rapidly as they can already follow predefined trajectories and process the crop in an automated fashion. However, an operator is still required in the cabin to avoid collisions with obstacles in the field. To address this problem, researchers study algorithms that can detect obstacles in the field based on sensors such as cameras/LiDARs. However, all the state-of-the-art research focuses on detection/classification based algorithms which detect classes of objects from datasets they are trained on. However, collecting datasets of every objects which might appear in the field is an impossible task and novel obstacles will fail to be detected posing a safety risk. The typical output of detection algorithms can be seen in the figure as a and b.
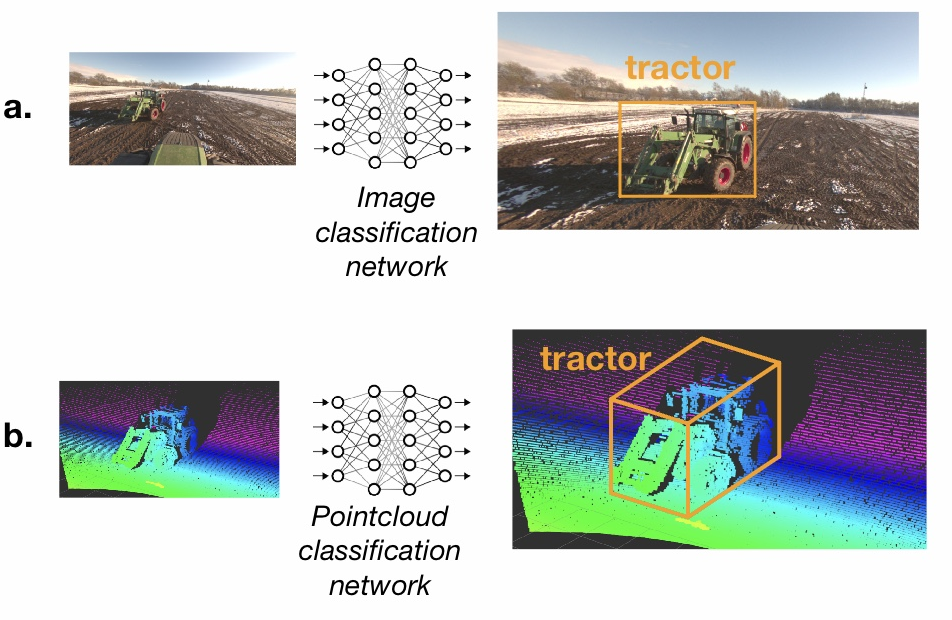
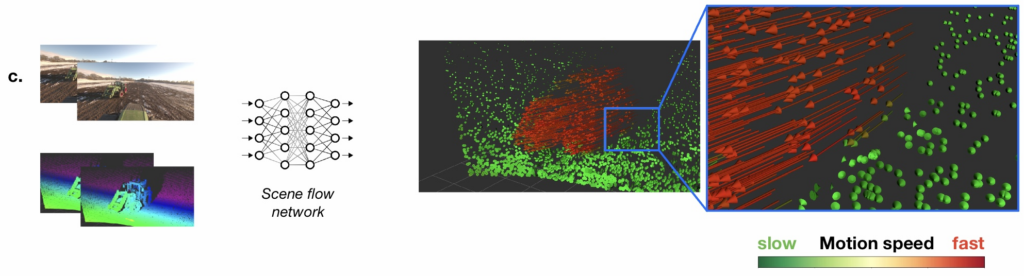
The objective of this project is to research a new class of algorithms called Scene Flow, which estimate dense motion within the environment (figure c) without the need for contextual understanding. Researchers hypothesize that Scene Flow will become an essential component for any autonomous driving application, as it can be used to detect obstacles based on their motion alone while estimating their velocity and direction, which is essential for avoidance. However, all the current research is limited to automotive setting. For that reason, this project will research Scene Flow in a novel, more challenging agricultural setting to promote innovation and push academic frontier.
Funding
This PhD project is funded by Innovation Fund Denmark under the grant number 3129-00060A and is conducted in collaboration with the company AGCO A/S.
Contact
PhD-student: Filip Slezák
Email: filips@create.aau.dk
Supervisor: Thomas B. Moeslund
Email: tbm@create.aau.dk
Company supervisor: Morten Stigaard Laursen