Project
The use of robotics in welfare technology is increasingly more common as these devices becoming both more capable and readily available. For instance; robotic arms or exoskeletons which could help an otherwise paralyzed person move. The potential for such assistive robotic devices is especially big for quadriplegics, i.e. persons with all four limbs paralyzed.
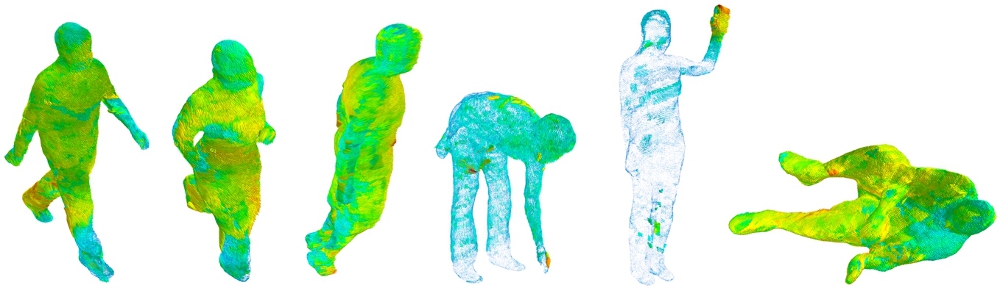
The objective of this project is to apply computer vision to make it easier for a paralyzed person to control an upper-body exoskeleton through a tongue-based interface. Computer vision would enable the system to become aware of its immediate environment in order to behave in more intelligent way. For instance; detecting nearby objects and how to interact with them. Another focal point of the project is the HRI (human robot interaction) as the system needs to arbitrate between input from the computer vision and input from the user in a sensible way.

Scientific Work
A review of computer vision for semi-autonomous control of assistive robotic manipulators (ARMs)
Bengtson, S. H., Bak, T., Struijk, L. N. S. A. & Moeslund, T. B., 2020, I : Disability and Rehabilitation: Assistive Technology. 15, 7, s. 731-745 15 s.
EXOTIC – a discreet user-based 5 DoF upper-limb exoskeleton for individuals with tetraplegia
Thøgersen, M., Gull, M. A., Kobbelgaard, F. V., Mohammadi, M., Bengtson, S. H. & Struijk, L. N. S. A., 2020, (Accepteret/In press) 2020 IEEE 3rd International Conference on Mechatronics, Robotics and Automation . s. 1-5 5 s.
Semi-Autonomous Tongue-Control of an Assistive Robotic ARM for Individuals with Quadriplegia
Hildebrand, M., Bonde, F., Kobborg, R. V. N., Andersen, C., Norman, A. F., Thøgersen, M., Bengtson, S. H., Dosen, S. & Struijk, L. N. S. A., 1 jun. 2019, 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR).IEEE, Bind 2019. s. 157-162 6 s. (I E E E International Conference on Rehabilitation Robotics. Proceedings, Bind 16).
Tongue control of exoskeletons and assistive robotic arms for individuals with tetraplegia
Struijk, L. N. S. A., Mohammadi, M., Thøgersen, M., Bengtson, S. H., Kobbelgaard, F. V., Gull, M. A., Kanstrup, A. M., Gaihede, M., Kasch, H. & Moeslund, T. B., 2019, Abstract book from the 16th Congress of the Nordic Spinal Cord Society : NoSCoS2019. s. 51 1 s. O26
Funding
This PhD is internally funded by Aalborg University.
Contact
PhD-Fellow: Stefan Hein Bengtson
Email: shbe@create.aau.dk
Supervisor: Thomas B. Moeslund
Email: tbm@create.aau.dk