Project
The sewerage systems are the large, hidden, and often forgotten, infrastructure of society. In order to maintain the infrastructure, the sewer pipes need to be regularly inspected by certified inspectors. Due to the size of the sewerage infrastructure pipes most pipes are inspected once every few years, causing proactive replacement of old pipes in order to avoid pipe failures.
Sewer inspection is a laborious task, which the Automated Sewer Inspection Robot (ASIR) research project aims to ease, through the development of an autonomous inspection robot. The autonomous robot will lead to inspections that are more frequent, which will allow better utilization of the sewer pipes by avoiding proactively repairing the sewer pipes.

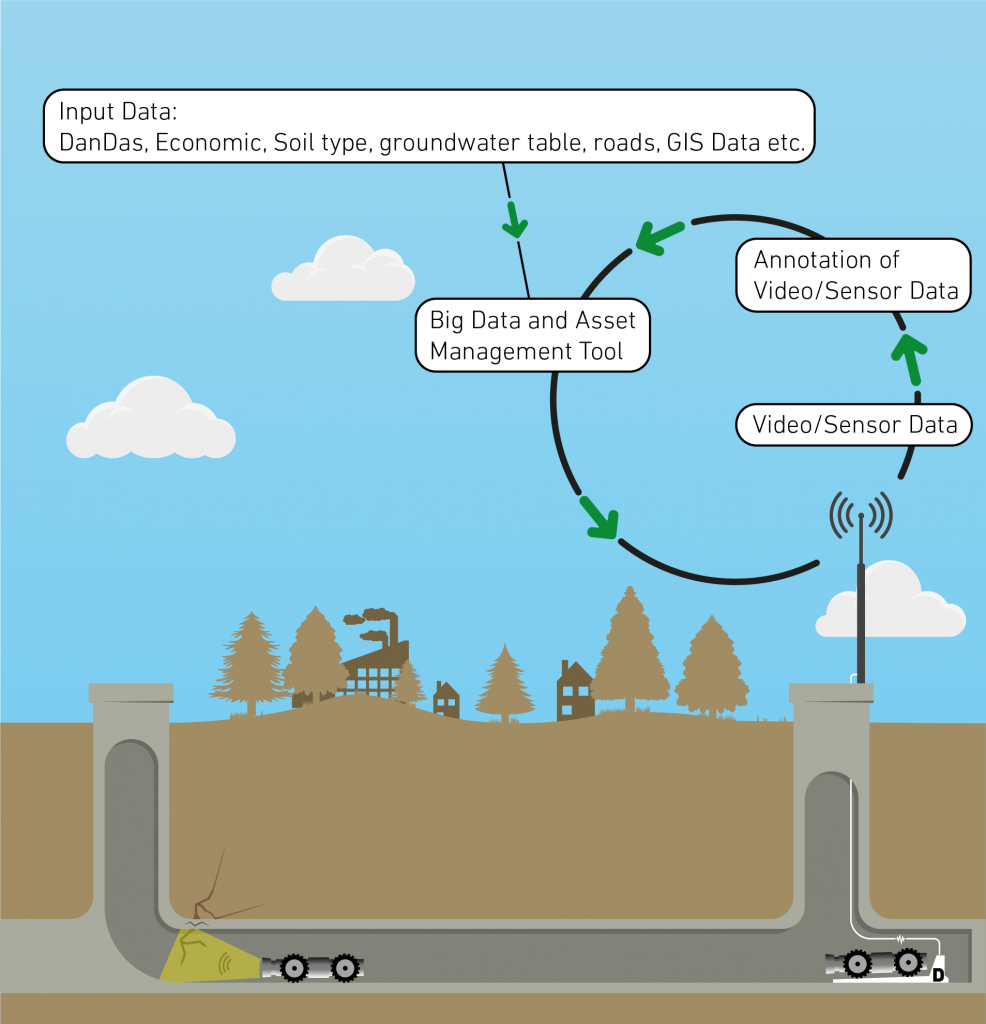
This PhD project aims at advancing the field of autonomous sewer inspections using the image and depth sensor information that will be available on the developed robot. We do this by developing and applying computer vision approaches, which can handle the unique and diverse setting of the sewer environment.
Scientific Work
A Survey on Image-Based Automation of CCTV and SSET Sewer Inspections
Haurum, J. B. & Moeslund, T. B., mar. 2020, I : Automation in Construction. 111, 19 s., 103061.
Water Level Estimation in Sewer Pipes using Deep Convolutional Neural Networks
Haurum, J. B., Bahnsen, C. H., Pedersen, M. & Moeslund, T. B., 4 dec. 2020, I : Water. 12, 12, 14 s., 3412.
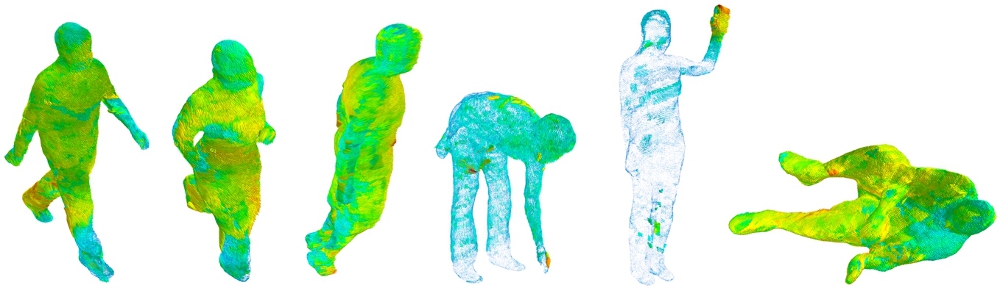
Generating Synthetic Point Clouds of Sewer Networks: An Initial Investigation
Henriksen, K. S., Lynge, M. S., Düring Bech Jeppesen, M., Allahham, M. M. J., Nikolov, I. A., Haurum, J. B. & Moeslund, T. B., 2020, Augmented Reality, Virtual Reality, and Computer Graphics: 7th International Conference, AVR 2020, Lecce, Italy, September 7-10, 2020, Proceedings, Part II. De Paolis, L. T. & Bourdot, P. (red.). Springer
Sewer Defect Classification using Synthetic Point Clouds
Haurum, J. B., Allahham, M. M. J., Lynge, M. S., Henriksen, K. S., Nikolov, I. A. & Moeslund, T. B., 2021, 16th International Conference on Computer Vision Theory and Applications (VISAPP).
Sewer-ML: A Multi-Label Sewer Defect Classification Dataset and Benchmark
Haurum, J. B., & Moeslund, T. B., 2021, IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR).
Multi-Task Classification of Sewer Pipe Defects and Properties using a Cross-Task Graph Neural Network Decoder
Haurum, J. B., Madadi, M., Escalera, S. & Moeslund, T. B., 2022, (Accepted/In press) IEEE/CVF Winter Conference on Applications of Computer Vision (WACV).
Funding
This PhD project is as part of the Automated Sewer Inspection Robot project, and funded by Innovation Fund Denmark under the grant number: 8055-00015A.
Contact
PhD-Student: Joakim Bruslund Haurum
Email: joha@create.aau.dk
Supervisor: Thomas B. Moeslund
Email: tbm@create.aau.dk