A part of the project: Marine Analytics using Computer Vision
Underwater Camera Calibration and 3D Reconstruction Based on Ray Tracing using Snell’s Law
Malte Pedersen, Stefan Hein Bengtson, Rikke Gade, Niels Madsen, Thomas B. Moeslund
CVPRW 2018
Introduction
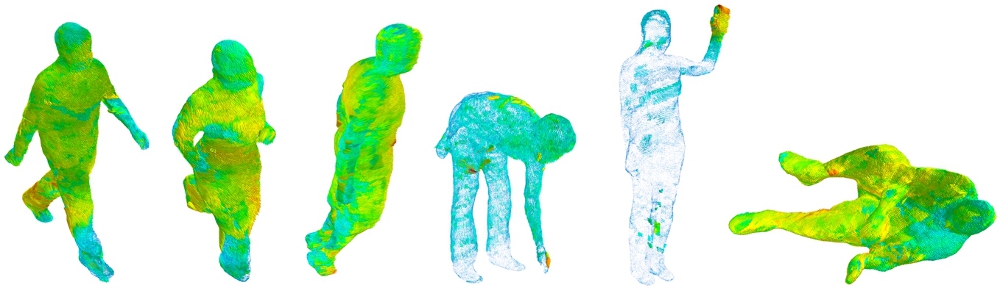
Research on marine animals is becoming increasingly popular in terms of studying pharmacology, genetics and marine ecosystems. One approach to study the impact of marine pollution is to expose a model organism to a pollutant in a controlled environment and analyze the behavioral patterns before and after the exposure.
Mapping these behavioral patterns is a time-consuming process and has therefore inspired multiple vision based
systems, which automate this process to some degree. However, a large part of these systems only supports
tracking of animals in a single plane; i.e., shallow water when working with marine animals. This is problematic
as most marine animals naturally move in three dimensions and studying them in a single plane is insufficient in most
cases.
Gathering 3D information about marine animals is not without difficulties in vision based systems as the light captured by the cameras will be exposed to refraction as it passes through different media. This is especially true when observing a fish tank with cameras placed outside the tank, which is a common setup as it imposes less restrictions on the placement of the cameras and their resistance to water.
Refraction and Snell’s Law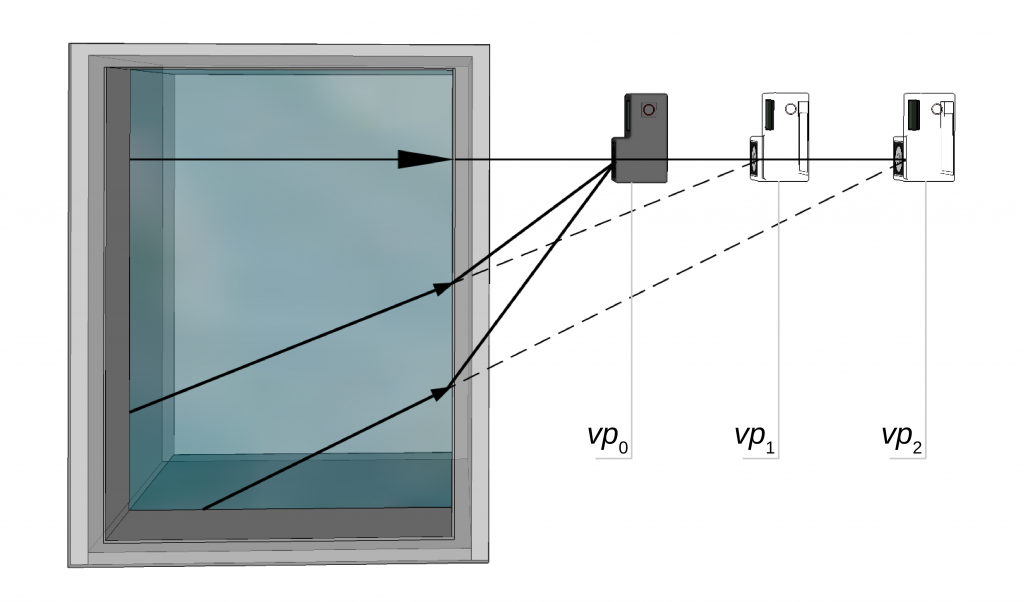
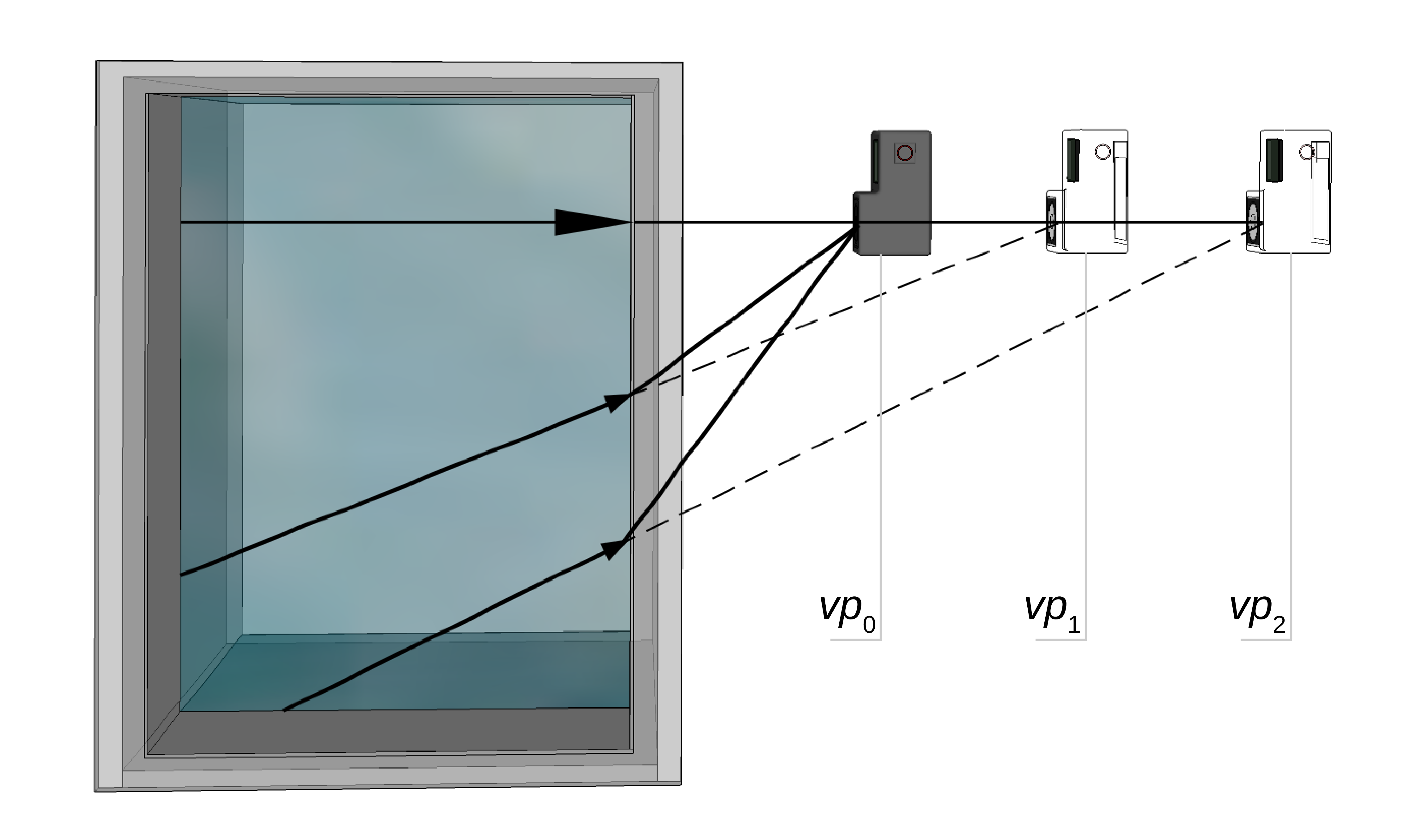
The refraction occurring at the media interfaces, such as the aquarium boundaries, can be described using Snell’s law which relates the angles of incidence and refraction of the light ray.
An illustration of how refraction affects a camera when observing an aquarium can be seen in the figure to the right, where multiple light rays travel from water to air until they are captured by the camera lens. The refraction essentially causes the camera to experience the scene as if it was observed from n viewpoints (vp) and thereby invalidates the assumption of a single viewpoint which is prevalent in most common camera models.
Citation
@InProceedings{Pedersen_2018_CVPRW,
author = {Pedersen, Malte and Bengtson, Stefan Hein and Gade, Rikke and Madsen, Niels and Moeslund, Thomas B.},
booktitle = {2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW)},
title = {Camera Calibration for Underwater 3D Reconstruction Based on Ray Tracing using Snell's Law},
month = {Dec},
year = {2018}
}